Features: Pneumatics everywhere and self decoupling container
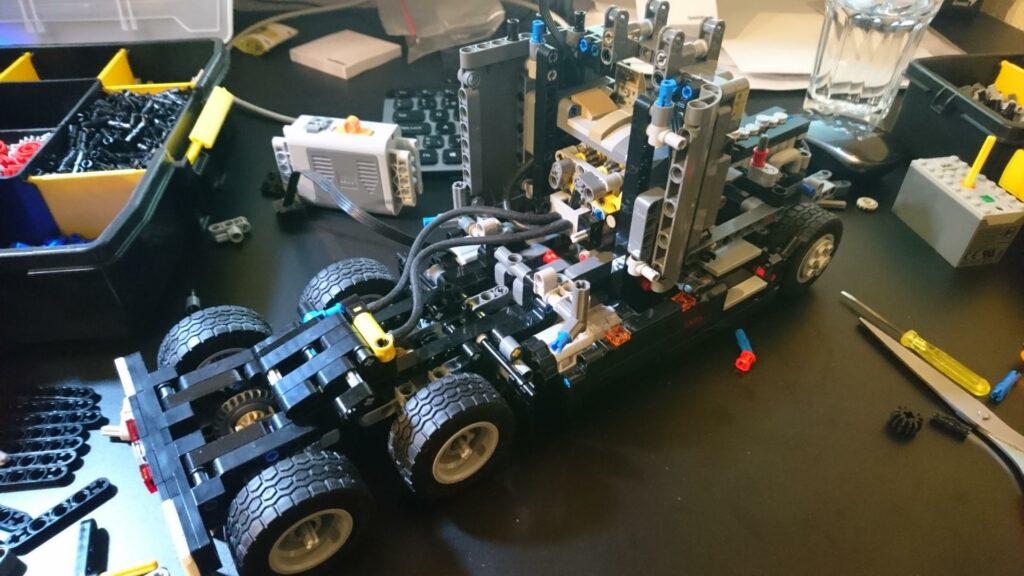
The MACK Anthem MOD/MOC with pneumatics was a project to show what is possible to build small remote-controlled models with pneumatics. Anyway, for reliability and efficiency it is much better to build this model with linear actuators and without pneumatics. So, this is absolutely not a reasonable model but I love pneumatics and it looks great with the pneumatic rams. The main challenge was to make the arms of the trailer working exactly with the same speed in order to unload the container correctly. Air under pressure (also liquids) always take the way of the smallest resistance. If two pneumatic cylinders are powered by one valve and a t-distributor and one cylinder has a greater inner resistance than the other one then the first one with the lower inner resistance will move and thereafter the other one. This is exactly what would happen if there is a little more resistance in one of the two arms of the trailer; the container won’t unload properly. Therefore, each arm needs an independent pneumatic cycle where exactly the same amount of air is push into the pneumatic rams. This was achieved by one PF M/L motor which powers two pneumatic auto-valves, each with an own pneumatic pump. Furthermore, I wanted to be able to decouple the container remotely. Therefore, to container need a PF IR receiver, a small battery box and one PF M motor with 4 small linear actuators. This was absolutely overkill but it worked. In a later modification I changed the remote control to Sbrick and the container got the additional functions driving and steering. The model has the following functions:
Tractor:
- Driving: 2 x PF L motor
- Steering: 1 x PF servo motor
- Fifth wheel: 1 x PF M motor with pneumatic auto-valve
- Lights: 4 x PF lights
Trailer:
- Outriggers unloading container: 1 x PF M motor with pneumatic auto-valve
- Outriggers for the trailer: 1 x PF M motor with pneumatic auto-valve
- Lifting container: 1x PF M motor with two pneumatic auto-valves
- Unloading container: 1 x PF L motor with two pneumatic auto-valves
Container:
- Decoupling: 1 x PF M motor for decoupling the chains
- Driving (later modification): 1 x PF M motor
- Steering (later modification): 1 x 9V micro motor
Control: at the beginning 4 x PF IR receiver, later 3 x Sbrick